| 2003 |

|
YEAR BOOK |
University of Limerick
|
Robots and the deep blue yonder
|

Certainly some marine resources can be accessed and exploited from shore, boats and platforms. To come to know the true wealth of the sub-sea world however requires exploration with submarines/submersibles. Submersible development for underwater work and exploration has to-date resulted in two major classes of craft - manned submersibles and remotely operated vehicles (ROVs tethered by cables back to a surface control station). In both cases the human operator provides the intelligence. The craft is designed to facilitate operator-controlled movements and control of video, sonar and other sensor systems, samplers and robot arms, etc. Providing a suitable safe environment for the human occupant in the case of manned craft or the tethering of ROVs back to the control station put significant limitations on the use of submersibles. Remote radio control of submersibles is not feasible as seawater absorbs radio signals over short distances. Very low frequency (VLF) communication with remote craft is possible: however there is insufficient bandwidth using VLF for real-time remote control.
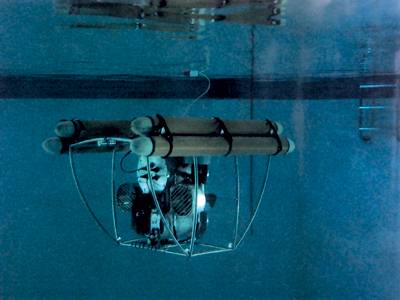
Many of the limitations can be overcome with autonomous intelligent craft or Autonomous Underwater Vehicles (AUVs), and such craft are beginning to appear. A group of researchers in Mobile & Marine Robotics at the University of Limerick are engaged in the development of AUVs and endowing these craft with the necessary artificial intelligence (AI) for vehicle control, deployment and survivability in the challenging sub-sea environment. Work to date has focused on building fully functional prototype AUV test-bed platforms such as the Tethra platform and the Mini Sub AUV in the figures. These vehicles are being used for the ongoing development and testing of AI software, control and navigation systems necessary for mission reliability - thereby enabling the deployment of video systems, sonar survey systems etc. for marine survey and other such applications. The AI approaches employed equip the vehicles with the intelligence needed to allow them to operate autonomously and survive when their operating environments change in ways that cannot be predicted in detail, a priori, by the programmer.
The name Tethra - an obscure and ancient Irish noun and adjective. It produced a verb meaning 'to flood', 'to burst forth', giving us just some examples. It has occurred as a proper name in the mythological cycle in reference to a 'Fomorian' king, aka. Muredhach. As an adjective, a rough sea would be intended. It also had the attributes of a War Goddess! Quite a name for our test vehicle until tamed through control and AI.
Reference
1.�A Marine Research, Technology, Development and Innovation Strategy for Ireland, Marine Institute, 1998.
Contact: Daniel Toal, E-mail: [email protected] ; Dr Colin Flanagan, E-mail: [email protected] ; Department of Electronic & Computer Engineering, University of Limerick; Web: http://www.ul.ie/~rescisg/C&ISGRobotics.html